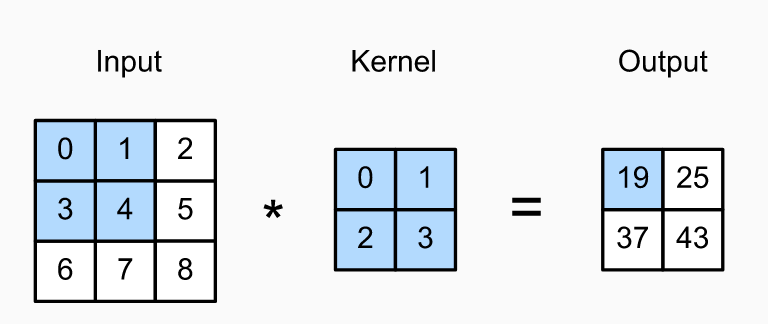
The Cross-Correlation Operation
假设对于一个只有一个颜色空间的3x3的图片,另外有一个2x2的卷积核,Cross-Correlation Operation的定义如下图:
代码实现:
1 | import tensorflow as tf |
Custom Convolution Layer
1 | class Conv2DDense(tf.keras.layers.Layer): |
Learning a Kernel
在对图片进行卷积操作时,我们很多时候是不知道应该将卷积核的每个元素的数值设置为多少的。假设我们知道输入的图片以及经过卷积操作之后应该得到的输出图片,要想知道卷积核每个元素的取值,这个问题其实本质上就是一个线性规划的问题,可以用梯度下降法来求的近似数值解。
1 | def learning_a_kernel(input: Union[tf.Tensor, tf.Variable], wanted_output: Union[tf.Tensor, tf.Variable], kernel_shape): |
卷积的目的
图像的卷积操作本质上是在对图像进行特征提取,所以经过卷积操作之后得到的结果也被叫做feature map。深度卷积网络一般一开始通过卷积提取边界、形状等信息,然后这些信息再经过卷积提取出语义信息
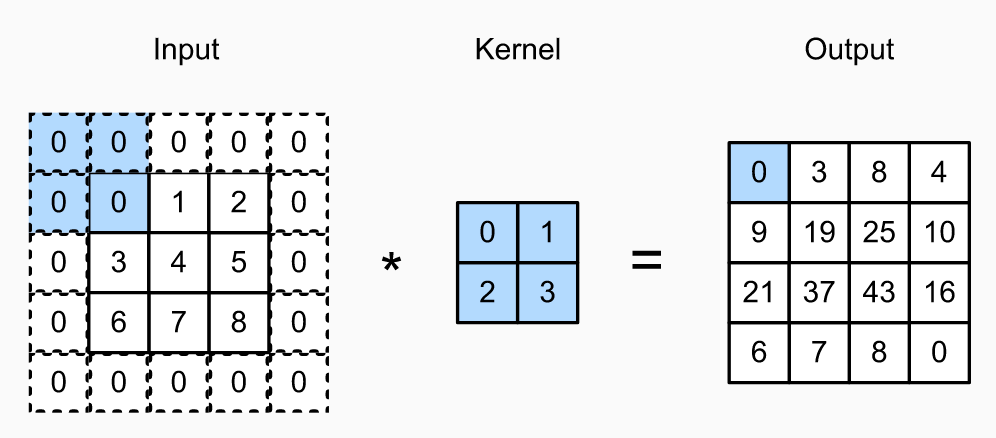
Padding
一般来说,如果我们对一个$n_h \times n_w$的图片用一个$k_h \times k_w$的卷积核进行卷积操作,那么输出图片的大小为$(n_h - k_h + 1) \times (n_w - k_w + 1)$。经过卷积操作之后,图片的大小会减小,同时,图片的边缘的信息也会被抹去。通常,一个卷积神经网络有好几层卷积层,如果不进行任何处理的话,那么经过多层卷积层之后,图片携带的信息可能就非常少了。
对输入图片进行Padding是一个常用的解决上面问题的方法。Padding即在图片周围填充额外的像素,通常,这些像素的值设置为0。如果我们对图像加入$p_h$行填充和$p_w$列填充,那么输出的图片的大小为$(n_h - k_h + p_h + 1) \times (n_w - k_w + p_w + 1)$
在许多情况下,通常会将$p_h$设置为$k_h - 1$,将$p_w$设置为$k_w - 1$,这样经过卷积之后的输出图片就和输入图片的大小一致。如果$k_h$为奇数(则$k_h - 1$为偶数),那么一般就在输入图片的上面和下面都加上$\frac{k_h - 1}{2}$行填充,如果$k_h$为偶数(则$k_h - 1$为奇数),那么可以在图片上方添加$\frac{k_h}{2}$行填充,在图片下方添加$(\frac{k_h}{2} - 1)$行填充,或者反过来。对于列填充来说也是这样的。
CNN中通常使用长和宽都为奇数的卷积核,使用奇数卷积核心可以保障在图片上下和左右添加的填充是均匀的。另外还有一个好处就是对于输出图片中的像素Y[i, j]来说,它正好是以输入图片中X[i, j](注意输入图片的坐标以未添加padding的原始图片的左上角为原点)为中心周围像素的卷积运算的结果。
下面以一个8 x 8的输入图片,一个3 x 3的卷积核来做padding处理下的卷积代码示例:
1 | import tensorflow as tf |
Stride
在之前的对图片进行卷积计算时,都是从图片左上角开始,每次向右移动一个像素,当一行计算完后,再往下移动一个像素。但是有些时候,为了计算效率和缩减采样次数,卷积窗口可以每次多向右或向下移动几个像素,跳过中间几个像素的计算。如下图:
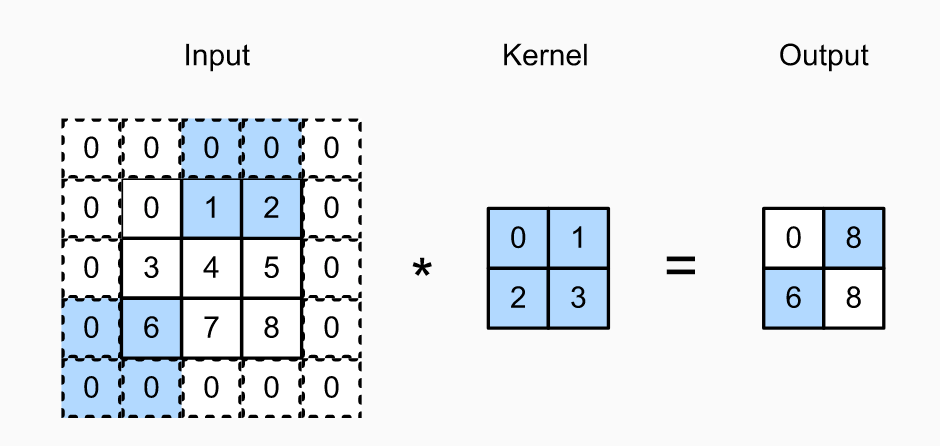
stride example
上图中的示例中,使用了水平2像素的stride,垂直3像素的stride。
假设输入图片的尺寸为$n_h \times n_w$,padding的尺寸为$p_h \times p_w$,卷积核的尺寸为$k_h \times k_w$,stride的尺寸为$s_h \times s_w$,则最终输出的结果的尺寸为$(n_h + p_h -k_h + s_h) / s_h, \space (n_w + p_w - k_w + s_w) / s_w$。
使用stride的代码示例:
1 | conv2d = tf.keras.layers.Conv2D(1, kernel_size=3, padding='same', strides=2) |
通常来说,我们会将padding的长宽设置为相同的,stride的长宽也设置为相同的,即使用正方形的padding和stride。
Stride is particularly useful if the convolution kernel is large since it captures a large area of the underlying image.
通常stride在输入图片较大时,可以用于控制卷积网络的深度。
Multi-Channel
多通道卷积输出,可以看作每个输出通道匹配的是某种模式,卷积输出通道数量是卷积层的超参数,卷积层的输出通道数可以看作mlp中的隐藏层中的节点数,输出通道数越多,模型就越复杂。
1x1 Convolutional Layer
1x1的卷积核不识别空间模式,它本质上是对输入通道进行加权融合,1x1的卷积层等价于一个全连接层
Pooling
pooling layers serve the dual purposes of mitigating the sensitivity of convolutional layers to location and of spatially downsampling representations.
池化层用于卷积+激活层之后。